The Growing Importance of EMG and Human-in-the-Loop Strategies in Wearable Robotics
Key Takeaways
1
Human-in-the-loop methods are becoming increasingly important in wearable robotics and assistive devices, making it possible to tailor rehabilitation to each individual and support faster recovery.
2
EMG signals can be used as input to machine learning algorithms that determine the level of assistance needed to reduce muscle effort for each patient.
3
Combining EMG with human-in-the-loop personalization improves the effectiveness of assistive devices and helps address the high rate of device abandonment in prosthetics and other assistive technologies.
The Concept
In wearable robotics and assistive device research, there’s a growing fascination with a concept known as human-in-the-loop. At its core, human-in-the-loop refers to incorporating human biosignals, like EMG, and machine learning algorithms to train and optimize the performance of a device. By measuring physiological signals, the device can learn and adjust, offering more personalized assistance and significantly improving its effectiveness.
Human-in-the-loop addresses one of the biggest challenges in assistive technology: device abandonment. Many patients stop using prosthetics or exosuits because the devices are complex, unmanageable, and impractical, proving that “one size fits all” doesn’t apply in this space. Incorporating real-time feedback like EMG facilitates personalization of the device, thus diminishing such barriers.
Patrick Slade and his team at the Slade Lab, part of the Harvard John A. Paulson School of Engineering and Applied Sciences, have made human-in-the-loop a central theme of their work in wearable and assistive robotics. In their projects, the lab uses Delsys EMG to track biosignals, as the input modality for their human-in-the-loop algorithms.
So How Does This Work in Practice?
EMG allows researchers to evaluate muscle activity during a task and determine whether the device is successfully reducing it. Based on optimization methods, the system can then learn the optimal assistance that minimizes muscular load and apply it in future uses, creating an adaptive feedback loop. Each iteration of the optimization method makes the device more beneficial than before.
One focus for our group is determining how to personalize mobility technology. It’s tough to make assistive devices beneficial because people respond unpredictably to assistance. Each person’s motor control and musculature are so different. Personalization helps account for these differences. We use EMG to understand muscle activity and perform simulations to model their musculoskeletal system. For assistive devices, this helps us reduce muscle activity and evaluate human-robot interaction.
Patrick Slade
Harvard University, Harvard John A. Paulson School of Engineering and Applied Sciences, Slade Lab
Two projects from the Slade Lab in particular showcase the power of EMG and its role in optimizing human-in-the-loop systems.
Project 1: The Third Arm
Many patients with mobility impairments require assistance for basic tasks such as sit-to-stand movements. The Slade Lab’s “Third Arm” project, led by Haedo Cho and Zoe Kutulakos, is designed to support users during these actions, acting as an additional limb to help reduce physical effort.
In this project, Delsys EMG is a key feedback signal to generate a score that reflects the level of assistance the device provides. This score is calculated by comparing muscle activity during an unassisted sit-to-stand with that of an assisted sit-to-stand.
Using this EMG-based score, the system can adapt the force needed to assist the user. This dynamic, data-driven process, referred to as opportunistic optimization, enables the device to provide the most optimal support possible.
“We have a lot of work on what we call opportunistic optimization. As you do an activity, the device gets better at that activity, and then as you do a different activity, we get better at that activity, and over time, it gets better at all the things that you like to do. For the third arm, the algorithm is trying to reduce key muscles by measuring how much that muscle is active and systematically finding what assistance reduces the muscle activity. As the human-in-the-loop optimization finds beneficial assistance patterns, it explores more in that force region. Basically the algorithm says okay, this seems promising for this individual, and then for poor scores, it explores there less and quickly can figure out what unique assistance each patient needs.”
Project 2: The Hip Exoskeleton
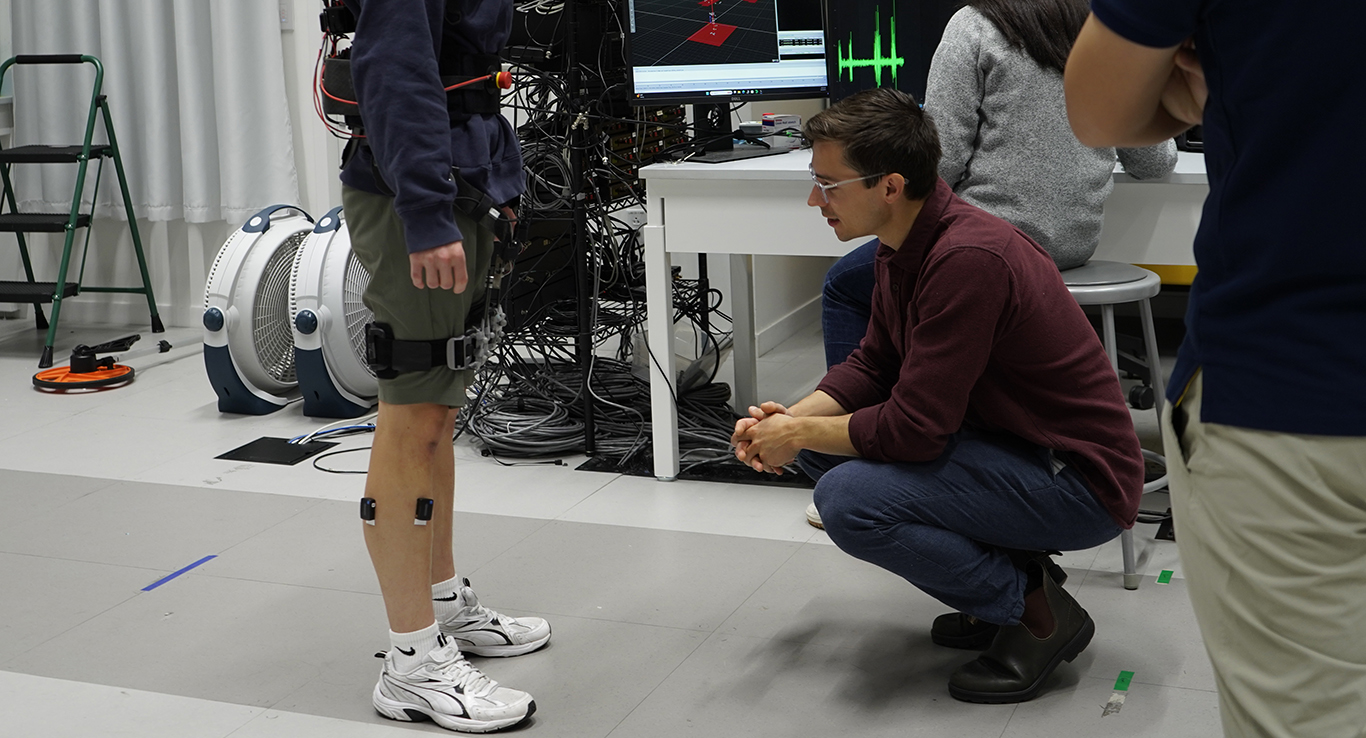
Walking requires significant hip flexion and extension, which many patients struggle with. The Slade Lab is developing a hip exoskeleton to provide targeted assistance at the hip joint, aiming to improve mobility during walking.
This project, led by Jae-Ryeong Choi, integrates IMU data and Delsys EMG to optimize the assistance provided. EMG is used to monitor muscle activity in the lower limb, helping to identify reductions in effort during assisted walking. By analyzing this data, the system is calibrated to deliver accurate support, reducing muscle strain and enhancing walking efficiency.
The Future of Human-In-The-Loop Research
The implementation of human-in-the-loop in wearable robotics has proven to be substantially beneficial, exceeding first expectations of 5% of muscle activity reduction to anecdotally 40-50%. The fascinating part? Integrating human-in-the-loop algorithms into projects is deceptively simple. It requires a small addition of code into an already built wearable device system. Its simplicity lowers barriers to entry and enables scalability and applicability of human-in-the-loop across a wide variety of research in prosthetics and wearable robotics.
“The tagline that I like to use is this: across all these different devices, we see personalization approximately doubling the benefits of the devices. So, if it takes you X million dollars and five to ten years to develop a device, why not spend one month on a little software update and double the effectiveness of your device? That’s our push— to make it more accessible and develop these algorithms and methods to make devices more effective.”
What Patrick and the Slade Lab are accomplishing through their work in wearable robotics and assistive devices demonstrates the value of human-in-the-loop systems. By using EMG as a performance metric, the team can assess and inform the system in real-time, making assistive devices more reliable, responsive, and user specific. The minimal effort required to integrate these systems is far outweighed by the substantial benefits they provide to patients. Human-in-the-loop is no longer optional; it is essential for the success of personalized wearable robotics and assistive technologies.
For more information on the use of EMG in Human-In-The-Loop Research, please reach out to contact@delsys.com.
Explore More Topics
Client Spotlight
The Growing Importance of EMG and Human-in-the-Loop Strategies in Wearable Robotics